In this article, we present the design, development, and characterization of a biomimetic robotic fish remotely controlled by an iDevice application (app) for use in informal science education. By leveraging robots, biomimicry, and iDevices, we seek to establish an engaging and unique experience for free-choice learners visiting aquariums, zoos, museums, and other public venues. The robotic fish incorporates a three-degree-of-freedom tail along with a combined pitch and buoyancy control system, allowing for high maneuverability in an underwater three-dimensional (3-D) space. The iDevice app implements three modes of control that offer a vividly colored, intuitive, and user-friendly theme to enhance the user experience when controlling the biomimetic robotic fish. In particular, the implemented modes vary in the degree of autonomy of the robotic fish, from fully autonomous to remotely controlled. A series of tests are conducted to assess the performance of the robotic fish and the interactive control modes. Finally, a usability study on elementary school students is performed to learn about students' perception of the platform and the various control modes.
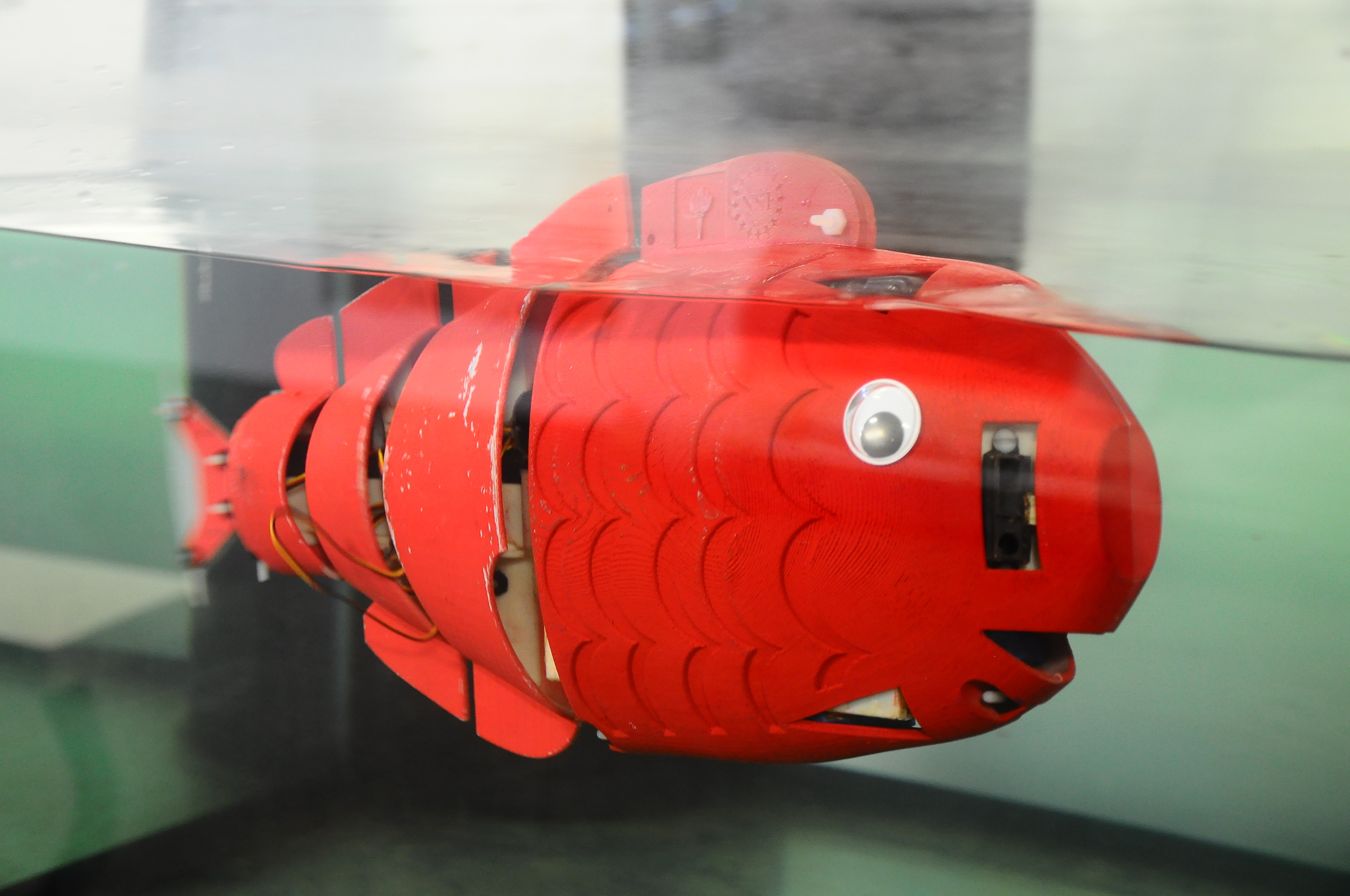
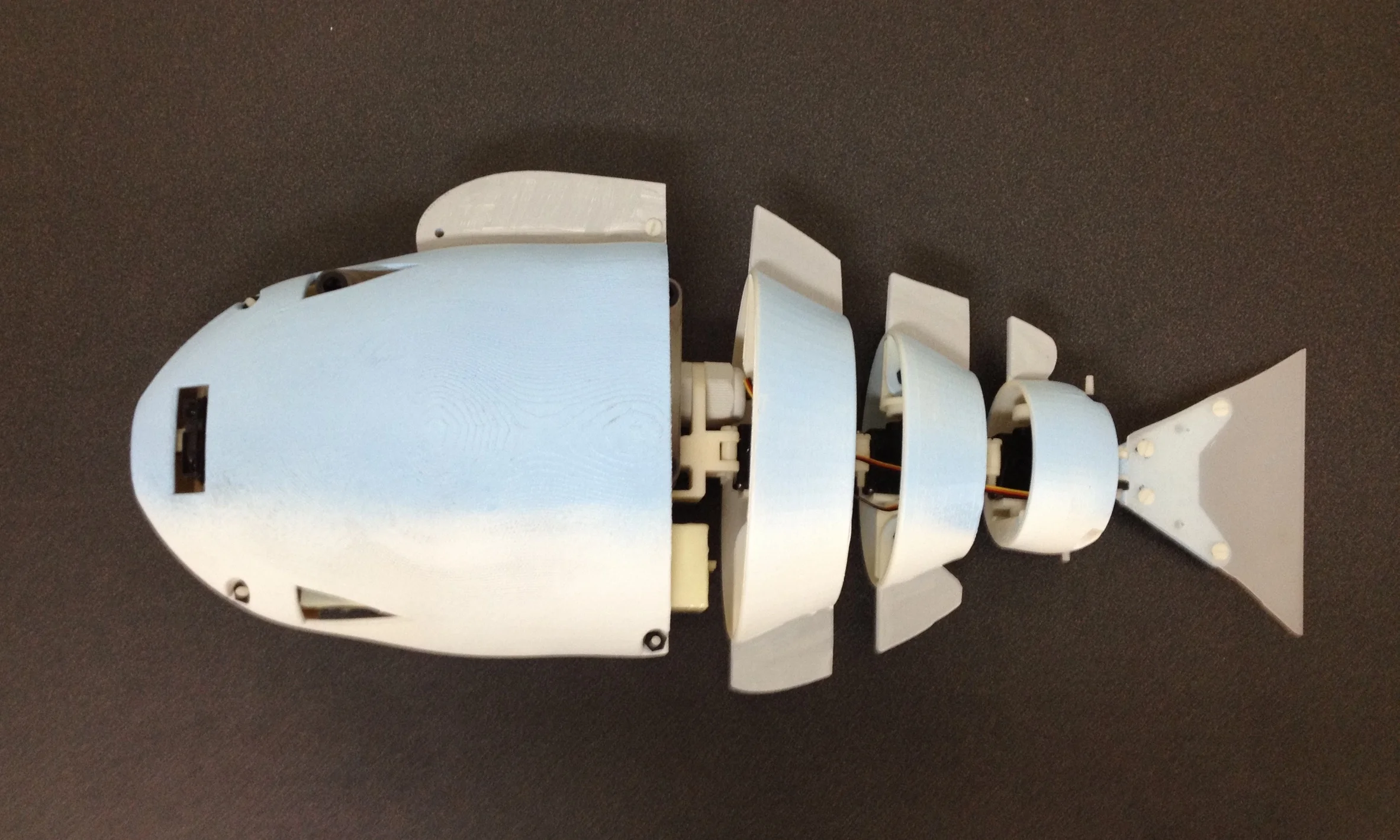
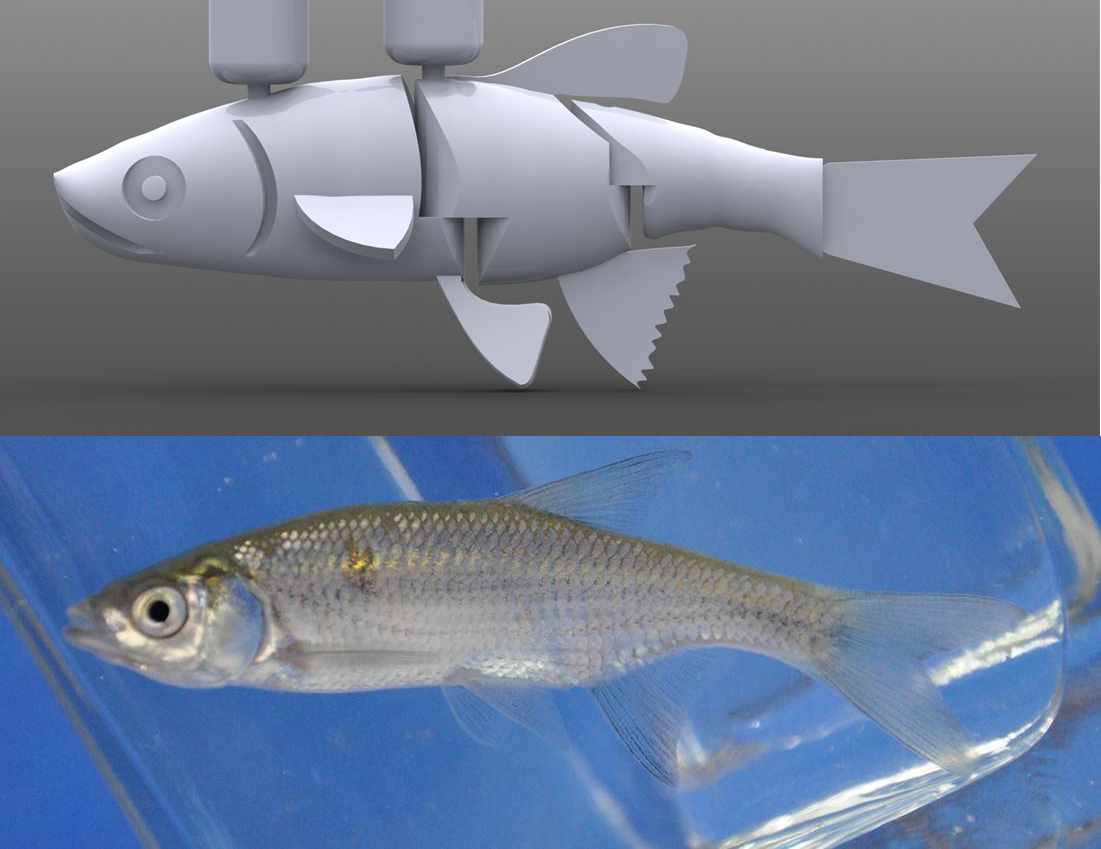
The possibility of integrating bioinspired robots in groups of live social animals may constitute a valuable tool to study the basis of social behavior and uncover the fundamental determinants of animal functions and dysfunctions. In this study, we investigate the interactions between individual golden shiners (Notemigonus crysoleucas) and robotic fish swimming together in a water tunnel at constant flow velocity. The robotic fish is designed to mimic its live counterpart in the aspect ratio, body shape, dimension, and locomotory pattern. Fish positional preference with respect to the robot is experimentally analyzed as the robot's color pattern and tail-beat frequency are varied. Behavioral observations are corroborated by particle image velocimetry studies aimed at investigating the flow structure behind the robotic fish. Experimental results show that the time spent by golden shiners in the vicinity of the bioinspired robotic fish is the highest when the robot mimics their natural color pattern and beats its tail at the same frequency. In these conditions, fish tend to swim at the same depth of the robotic fish, where the wake from the robotic fish is stronger and hydrodynamic return is most likely to be effective.
Informal science education is the process of scientific learning that takes place outside of the classrooms and academic institutions. It is the most predominant form of learning across life-long education, is spontaneous in nature, and has practically unlimited opportunities. Informal learning can occur through visits to museums and galleries, participation in science festivals, and even watching educational programs. For visitors to informal science venues, robotics has been shown to be an effective tool to elicit their interest, as it often affords several elements of novelty. Further, robotics offers quick feedback for participants to test new ideas or reinforce preexisting knowledge. Thus, a number of robotics-based exhibits, such as the exploratory rover, robotic dolphin, and remotely controlled miniature boats, have been designed to increase visitors’ interest in robotics, while delivering important topics in science, like space explorations and environmental mapping. Biologically-inspired robotic fish have been found to be particularly engaging, likely due to the additional connections to the natural world they can offer. Thus, a few robotic fish exhibits have been deployed to engage and educate visitors in public aquariums and expositions. However, such exhibits are often limited in the level of interactivity they afford, which is known to be a key factor in informal science education.